PL300B
手术导航定位系统
开启智能(néng)化手术新(xīn)时代 PL300B

开启智能(néng)化手术新(xīn)时代 PL300B
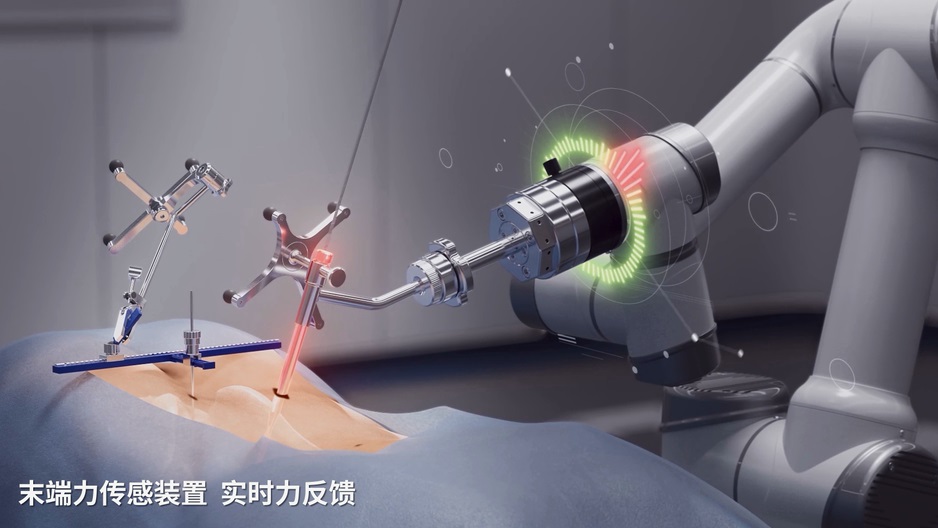
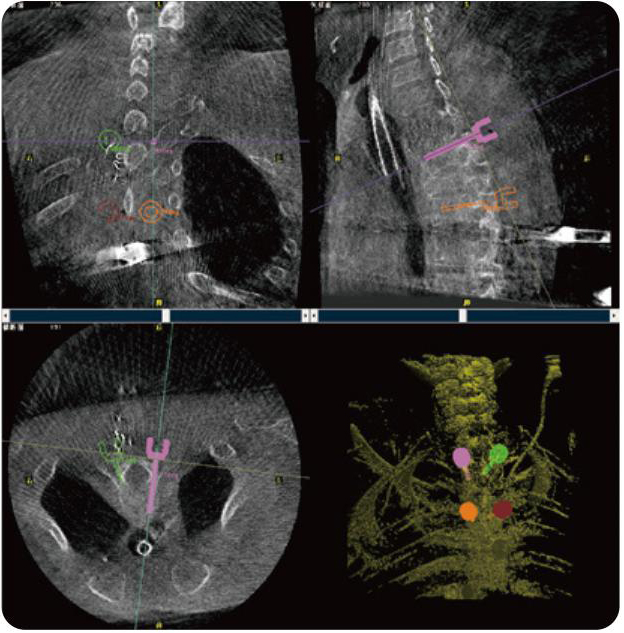
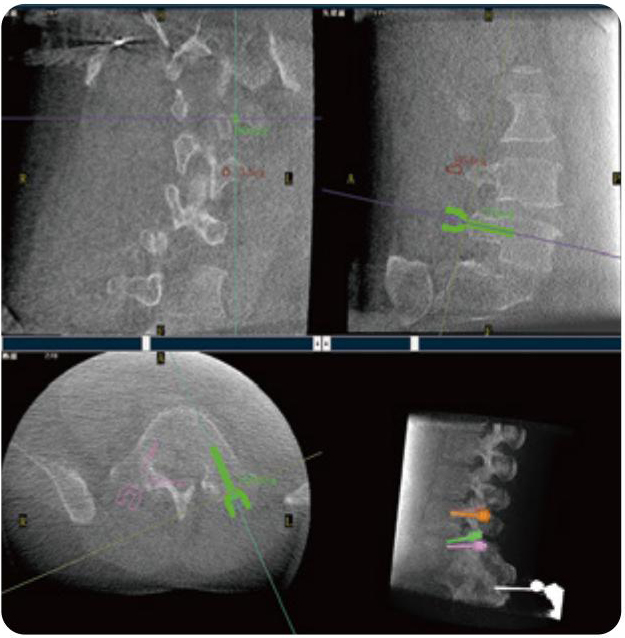
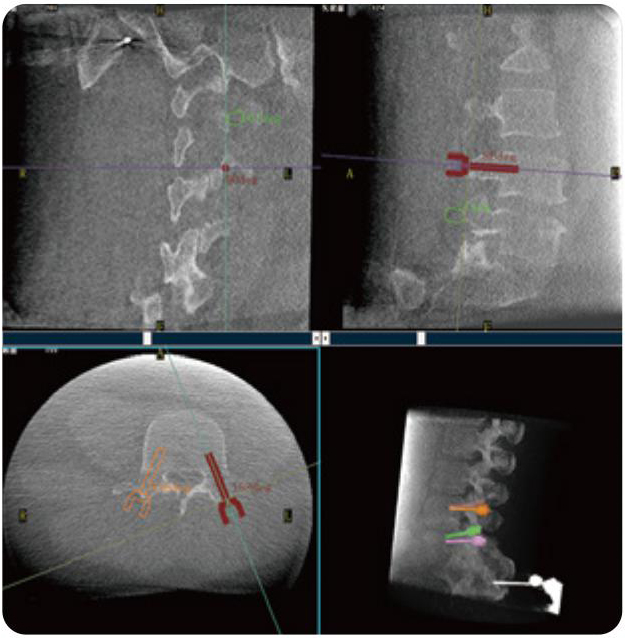
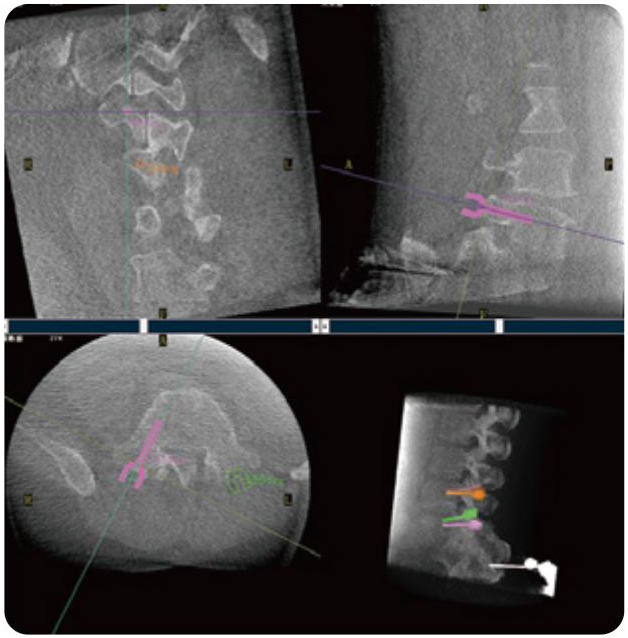
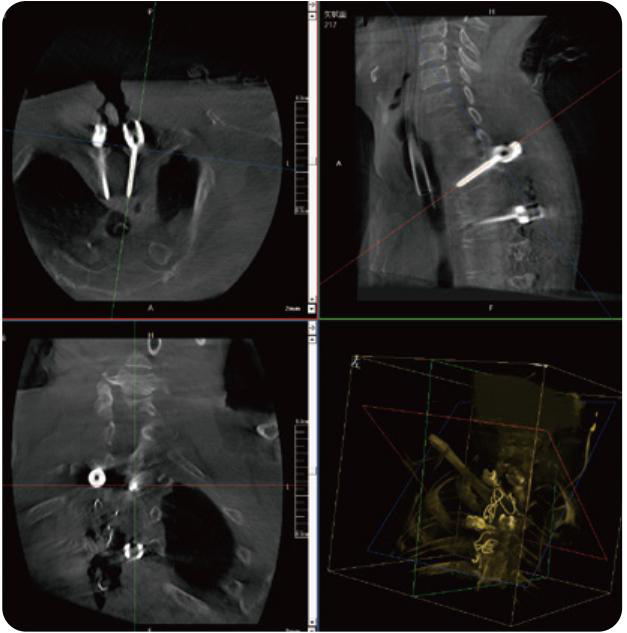
PL300B可(kě)应用(yòng)于多(duō)节段脊柱外科(kē)手术,辅助医(yī)生定位病灶部位,為(wèi)脊柱外科(kē)手术(经皮椎體(tǐ)成形术、椎弓根螺钉内固定术等术式)提供术前手术流程规划、入钉位置、角度可(kě)视化引导,模拟仿真入钉辅助。
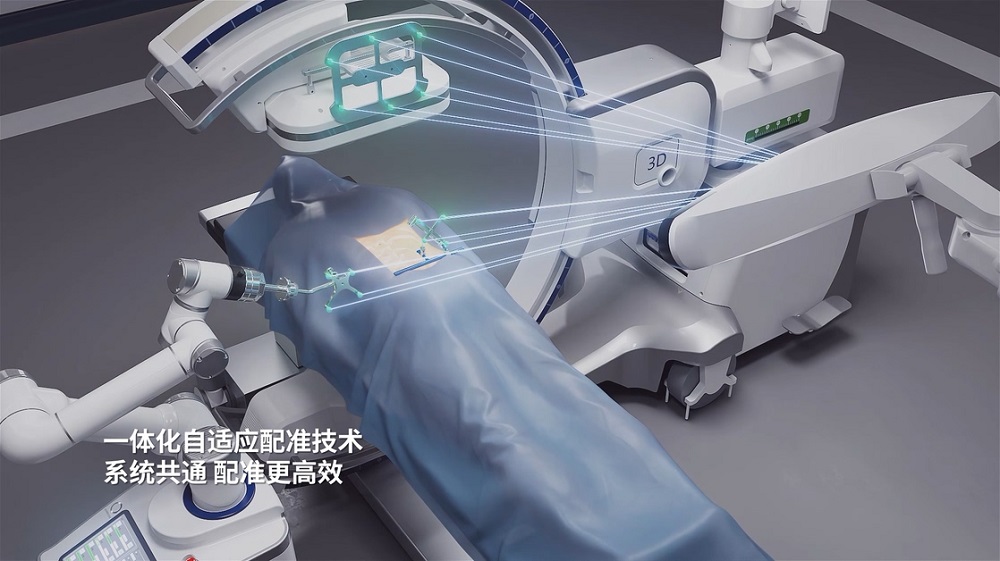
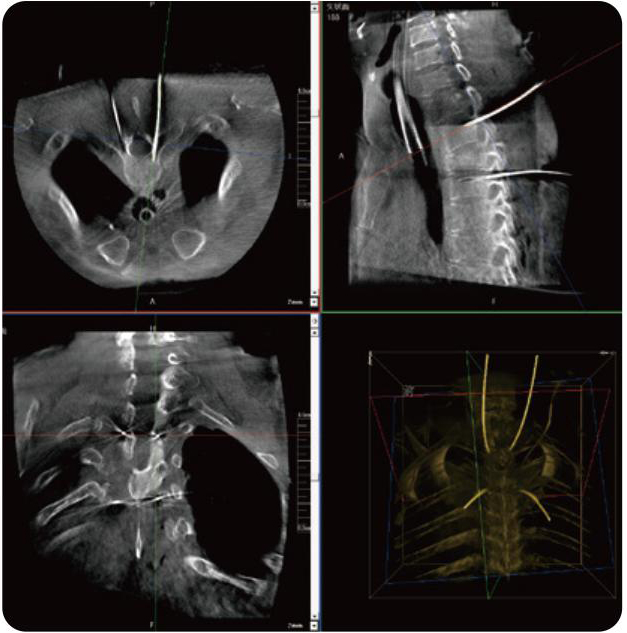
PL300B搭配普爱医(yī)疗自主研发生产(chǎn)的平板3D C形臂,借助一體(tǐ)化自适应配准( 轨迹配准)技(jì )术,通过追踪C形臂三维采集轨迹,自动完成图像坐(zuò)标建立和系统坐(zuò)标配准。配准精(jīng)度更高,操作(zuò)步骤少,系统运作(zuò)效率高。